無人機技術的快速發(fā)展,使其在航拍測繪、農(nóng)業(yè)植保、應急救援、物流配送等領域的應用日益廣泛。其中,飛行控制系統(tǒng)是無人機的“大腦”,而相機與通信系統(tǒng)則是其關鍵的“感官”與“神經(jīng)”。將高性能相機與高可靠通信系統(tǒng)無縫集成到飛行控制系統(tǒng)中,是提升無人機智能化、自動化水平與任務效能的核心環(huán)節(jié)。本文旨在探討這一集成開發(fā)過程中的關鍵技術、挑戰(zhàn)與協(xié)同設計思路。
一、 相機集成:從數(shù)據(jù)采集到智能感知
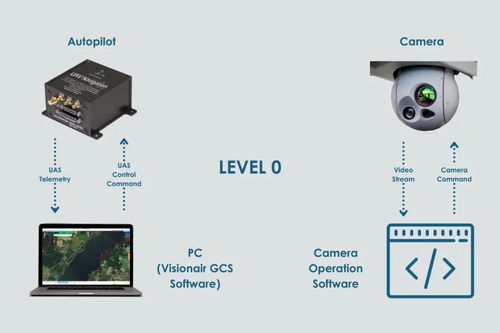
在飛行控制系統(tǒng)中集成相機,遠非簡單的物理搭載。其核心在于實現(xiàn)視覺數(shù)據(jù)與控制指令的閉環(huán)。
- 硬件接口與同步:需解決相機(包括可見光、紅外、多光譜等)與飛控主處理器之間的高速數(shù)據(jù)接口問題,如MIPI CSI-2、USB 3.0等。更重要的是時間同步,需通過硬件觸發(fā)或精確的軟件時間戳,確保每一幀圖像數(shù)據(jù)都帶有精確的GPS時間(或其他全局時間源),以便與飛控的位姿(位置、姿態(tài))數(shù)據(jù)嚴格對齊,為后續(xù)處理奠定基礎。
- 數(shù)據(jù)處理與低延遲:相機產(chǎn)生的海量圖像數(shù)據(jù)需要高效處理。集成方案需考慮在飛控端進行初步的圖像預處理(如畸變校正、降噪)甚至關鍵特征提取,以減輕數(shù)據(jù)下行壓力和后續(xù)處理負擔。對于實時目標跟蹤、避障等應用,數(shù)據(jù)處理鏈路的低延遲至關重要。
- 智能算法嵌入:現(xiàn)代無人機飛控正逐漸融入計算機視覺算法。集成相機時,需考慮如何在飛控的有限計算資源上部署輕量化的視覺SLAM(同步定位與建圖)、目標識別、視覺伺服等算法,使無人機具備環(huán)境理解與自主決策能力。
二、 通信系統(tǒng)集成:構建可靠的數(shù)據(jù)鏈路
通信系統(tǒng)是無人機與地面站、其他無人機或云平臺交互的紐帶,其集成質(zhì)量直接關乎操控安全與數(shù)據(jù)實效。
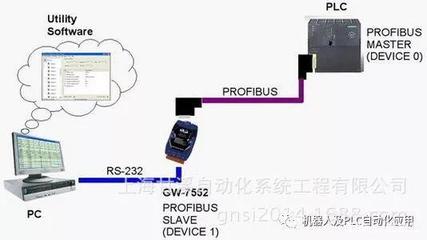
- 多鏈路融合與冗余設計:典型的無人機通信系統(tǒng)包括:用于遙控指令與關鍵遙測傳輸?shù)母呖煽俊⒌脱舆t數(shù)傳電臺(如2.4GHz/900MHz),以及用于高清圖像/視頻等大數(shù)據(jù)量下行的圖傳鏈路(如5.8GHz Wi-Fi或COFDM)。集成開發(fā)需實現(xiàn)雙鏈路甚至多鏈路(如加入4G/5G蜂窩網(wǎng)絡作為備份)的智能管理與無縫切換,確保在復雜電磁環(huán)境或遮擋情況下的鏈路持續(xù)性。
- 協(xié)議棧定制與優(yōu)化:通信協(xié)議棧需要深度定制以適應航空環(huán)境。這包括:
- 數(shù)據(jù)分包與優(yōu)先級調(diào)度:對飛控狀態(tài)數(shù)據(jù)、相機控制指令、圖像流數(shù)據(jù)等不同優(yōu)先級的信息進行差異化傳輸保障。
- 前向糾錯與抗干擾:針對無線信道特點,采用強健的編碼和調(diào)制技術,提升抗干擾與抗衰落能力。
- 加密與安全認證:集成硬件或軟件加密模塊,防止數(shù)據(jù)竊取與非法控制。
- 與飛控的深度交互:通信系統(tǒng)狀態(tài)(如信號強度、鏈路質(zhì)量、延遲)應實時反饋給飛控。飛控可根據(jù)鏈路質(zhì)量自適應調(diào)整飛行策略,例如在信號弱時自動執(zhí)行返航或懸停,實現(xiàn)通信感知的自主飛行安全。
三、 相機與通信系統(tǒng)的協(xié)同集成開發(fā)
真正的集成挑戰(zhàn)在于讓相機系統(tǒng)與通信系統(tǒng)在飛控的統(tǒng)一調(diào)度下高效協(xié)同工作。
- 帶寬的智能分配與管理:這是協(xié)同集成的核心矛盾。高清、高幀率相機會產(chǎn)生巨大數(shù)據(jù)流,而通信帶寬有限。集成方案需實現(xiàn)動態(tài)帶寬分配:
- 碼率自適應:圖傳系統(tǒng)根據(jù)當前鏈路質(zhì)量和任務需求,動態(tài)調(diào)整視頻編碼的碼率與分辨率。
- 興趣區(qū)域(ROI)編碼:結合機載視覺分析結果,僅對圖像中的關鍵區(qū)域(如檢測到的目標)進行高碼率傳輸,背景區(qū)域則采用低碼率,從而大幅節(jié)省帶寬。
- 任務觸發(fā)式傳輸:非關鍵時段僅傳輸?shù)蛶暑A覽流或縮略圖,當識別到特定事件(如發(fā)現(xiàn)異常)時,再自動觸發(fā)高清原始數(shù)據(jù)或高幀率流傳輸。
- 端到端延遲優(yōu)化:從相機曝光到圖像在地面站顯示,整個鏈條的延遲必須最小化,尤其對于第一人稱視角(FPV)飛行或精準操控。這需要相機采集、機內(nèi)處理、編碼、無線傳輸、地面解碼與顯示各環(huán)節(jié)的緊密協(xié)同與優(yōu)化。
- 統(tǒng)一的數(shù)據(jù)與時間框架:飛控、相機、通信系統(tǒng)必須運行在統(tǒng)一的時間基準和坐標系下。所有數(shù)據(jù)(姿態(tài)、位置、圖像幀、控制指令)都應帶有同步時標,以便在地面站或云端進行精準的數(shù)據(jù)融合與事后分析。
四、 開發(fā)挑戰(zhàn)與未來趨勢
集成開發(fā)面臨計算資源、功耗、尺寸重量(SWaP)以及復雜電磁兼容性(EMC)的多重約束。未來發(fā)展趨勢將聚焦于:
- 異構計算平臺的應用:采用集成了CPU、GPU、DSP、神經(jīng)網(wǎng)絡加速器的SoC芯片,高效處理飛行控制、視覺與通信任務。
- 軟件定義無線電(SDR)與認知無線電:使通信系統(tǒng)能動態(tài)感知頻譜環(huán)境并自適應調(diào)整參數(shù),提升頻譜利用率和抗干擾能力。
- AI驅動的全棧優(yōu)化:利用人工智能技術,從圖像采集策略、壓縮編碼模式到通信鏈路選擇進行全局聯(lián)合優(yōu)化,實現(xiàn)任務效能的最大化。
- 云-邊-端協(xié)同:將部分計算密集型任務(如大規(guī)模地圖構建、復雜模型推理)卸載到邊緣服務器或云端,機載系統(tǒng)專注于實時性要求高的任務,通過5G等高速鏈路實現(xiàn)協(xié)同。
無人機飛行控制系統(tǒng)中的相機與通信系統(tǒng)集成,是一個涉及硬件、軟件、算法、協(xié)議的復雜系統(tǒng)工程。成功的集成不是簡單的功能疊加,而是基于任務需求的深度耦合與協(xié)同設計。通過構建一個低延遲、高可靠、智能自適應的“感知-通信-控制”一體化平臺,方能充分釋放無人機的應用潛力,推動其向更高層次的自主化與智能化邁進。


![代碼base '未來視角模擬區(qū)域前瞻項給PDF詳注_好']](/uploads/image_117725/202605/23/2118bc026d00f2157f12e632d0c0bca5-329x210.jpg)